水平多关节机器人空中360度型
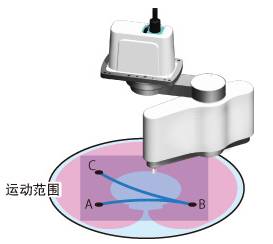
可在装置下方360度全区域运动
凭借悬挂结构和大范围的机械手臂旋转角度,可以覆盖装置下方360度全区域。动作平面范围与本公司机械手臂长500mm的以住机型相比,扩大了约120%。动作范围中心没有死区,可实现φ1,000mm×130mm范围的动作。动作范围为圆柱形,托盘和传送带在设置方向上没有限制,提高了系统设计的自由度。
通过高速移动缩短产距时间
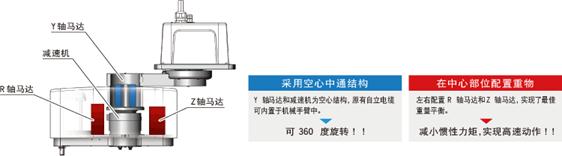
凭借Y轴(第2臂)可在X轴(第1臂)下方通过的水平多关节结构,能够以最佳路径实现轨迹间的高速移动。尤其在电子、食品行业等轻负载搬运工序中,可大幅缩短产距时间。
凭借高机械刚度实现高速、高精度定位
彻底改善机器人内部结构,实现最佳重量平衡。同时,通过配备针对轻量和高刚度机械手臂调节至最佳的马达,实现了高速、高精度定位。
位置检测器采用旋转变压器
旋转变压器是电磁式位置传感器。采用无电子零件和光学元件的简单结构,与普通光学编码器相比,具有潜在故障部位少的特点。多应用于要求环境适应性高、故障发生率低的汽车、飞机等注重可靠性的领域。

机身高度低、机器小巧
机身总高为392mm,可降低设备整体的重心位置。因此,无需坚固的框架,可以缩小设备整体尺寸。而生产设备缩小又可以进一步缩短工件搬运时间。 |